| 侾丏 |
- 側偑偝俋俆倣倣俀杮偲係俆倣倣俀杮偲俁俆倣俀杮偺儐僯僶乕僒儖傾乕儉傪傛偆偄偟傑偡丅
- 係俆倣倣傾乕儉偺堦斣偼偟偺寠偵俵俁亊侾俆偺僱僕傪偲偍偟偰暯儚僢僔儍亅傪擖傟偰
俋俆倣倣傾乕儉偺偼偠偐傜俉偽傫傔偺寠偵偲偍偟偰偔偩偝偄丅
偝傜偵暯儚僢僔儍亅傪擖傟偰俁俆倣倣偺堦斣偼偟偺寠偵偲偍偟偰僫僀儘儞僫僢僩偱
偲傔傔偰偔偩偝偄丅乮僈僞偑柍偔僗儉乕僘偵丄偆偛偔偰偄偳偵偟傔偰偔偩偝偄丅乯
偙傟傪俀僙僢僩嶌偭偰偔偩偝偄丅
|
 |
| 俀丏 |
- 偮偯偄偰丄側偑偝俇侽倣倣俀杮偲係俆倣倣俀杮偺儐僯僶乕僒儖傾乕儉傪傛偆偄偟傑偡丅
- 係俆倣倣傾乕儉偺堦斣偼偟偺寠偵俵俁亊侾俆偺僱僕傪偲偍偟偰暯儚僢僔儍亅傪擖傟偰
俇侽倣倣傾乕儉偺堦斣偼偟偺寠偵偲偍偟偰暯儚僢僔儍亅傪擖傟偰倐偱偮偔偭偨傇傂傫偺
俁俆倣倣傾乕儉偺堦斣偼偟偺寠偵偲偍偟偰僫僀儘儞僫僢僩偱偲傔偰偔偩偝偄丅
偙偺偲偒丄倐偺傇傂傫偼俁俆倣倣傾乕儉偑堦斣壓偵側傞傛偆側傓偒偱偲傝偮偗偰壓偝偄丅
乮僈僞偑柍偔僗儉乕僘偵丄偆偛偔偰偄偳偵偟傔偰偔偩偝偄丅乯
- 偐偭偰偪偑偄偵側傞傛偆偵丄傕偆侾僙僢僩偮偔偭偰偔偩偝偄丅
乮僈僞偑柍偔僗儉乕僘偵丄偆偛偔偰偄偳偵偟傔偰偔偩偝偄丅乯
|
 |
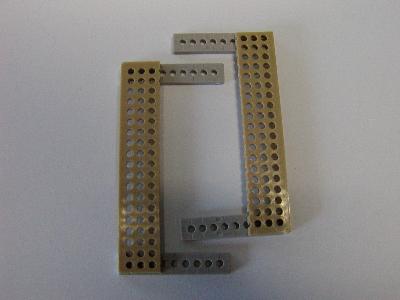
| 俁丏 |
- 儐僯僶乕僒儖僾儗乕僩僙僢僩傪傛偆偄偟傑偡丅
- 儐僯僶乕僒儖僾儗乕僩傪偩偟偰僸僎傪僯僢僷偱偲傝傑偡丅
偮偓偵側偑偝侾侽侽倣倣偵僇僢僞乕偱愗傝傑偡丅
偒偭偨僾儗乕僩傪偼偠偐傜係偽傫傔偺寠偵偁傢偣偰僇僢僞乕偱愗傝傑偡丅
偙傟傪俀枃偮偔傝傑偡丅
- 忋偱偮偔偭偨僾儗乕僩傪塃恾偺傛偆偵俆侽倣倣傾乕儉傪偣偭偪傖偔偟傑偡丅
|
 |
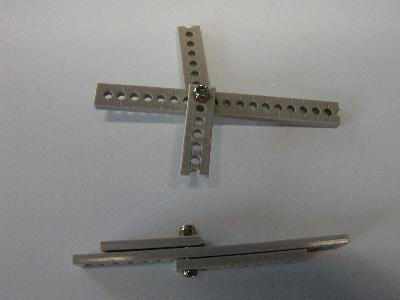
| 係丏 |
- 俁丏偱偮偔偭偨僾儗乕僩偵丄儐僯僶乕僒儖傾乕儉僙僢僩偵擖偭偰偄傞幉偆偗傪
傾乕儉傪偣偭偪傖偔偟偨柺偲斀懳懁偺偼偠偐傜俇偽傫傔偲侾侾偽傫傔偺寠偵
俵俁亊侾侽僱僕偲僫僢僩偱偲傝偮偗傑偡丅
偙偺偲偒丄僱僕偼僾儗乕僩懁偐傜擖傟偰幉偆偗懁偼
僫僢僩偱偲傔傑偡丅
傕偆侾屄偼丄偐偭偰偪偑偄偵偲傝晅偗傑偡丅
|
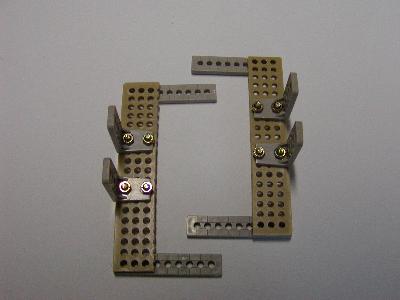 |
| 俆丏 |
- 俀丏偱偮偔偭偨偁偟偺俋俆倣倣傾乕儉偺侾斣偼偠偺寠乮俁俆倣倣傾乕儉偐傜側偑偄懁乯
偲俇侽倣倣傾乕儉偺堦斣偼偠偺寠傪係丏偱偮偔偭偨傇傂傫偺幉偆偗偺忋偐傜
俀偽傫傔偺寠偵俵俁亊侾侽偺僱僕偲僫僀儘儞僫僢僩偱塃恾偺傛偆偵偲傔傑偡丅
偁偄偩偵暯儚僢僔儍亅傪偄傟傑偡丅
乮僈僞偑側偔僗儉乕僘偵偆偛偔偰偄偳偵偲傔傑偡丅乯
- 塃恾偲偐偭偰偪偑偄偵丄傕偆侾屄偔傒偨偰傑偡丅
|
 |
|
偄偠傚偆偱僗僥僢僾係偼丄偟傘偆傝傚偆偱偡丅
偠偐偄偼丄偄傛偄傛嵟廔夞丄偠傇傫偩偗偺俀懌曕峴儘儃僢僩傪偐傫偣偄偝偣傑偟傚偆丅
|
|



