|
You Tubeで見かけた、海外の企業が造った ヒレをヒラヒラさせて泳ぐ水中ロボットを造りたくなり 見様見真似で造ってみました。 ヒラヒラで推進力が生まれるのかを検討するために 試作機を造ってみました。 |
|---|
 |
|
|
|
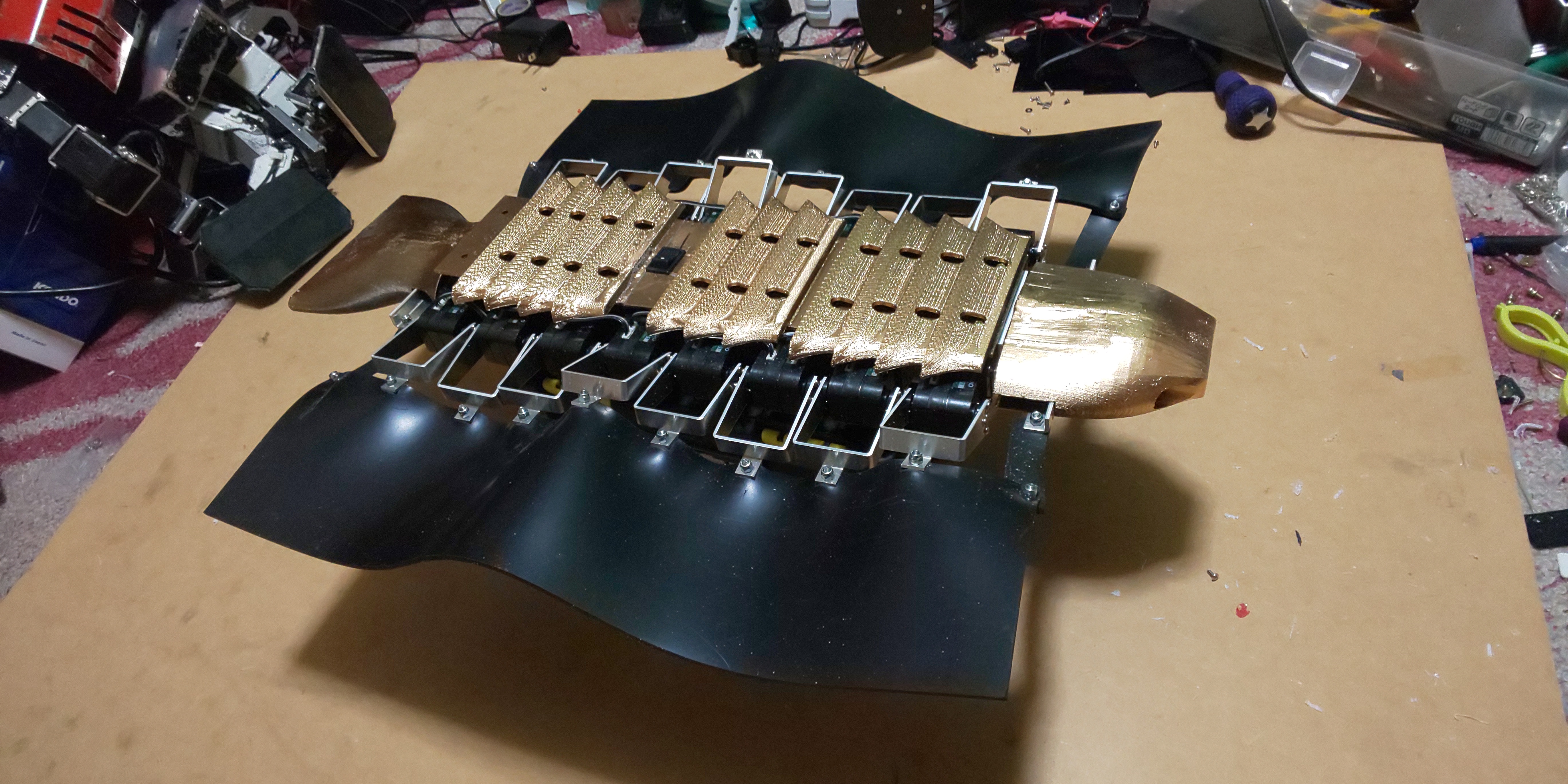
とりあえず、推進力はあるみたいなので水中サーボを使って造ってみました。
|
|
|
 |
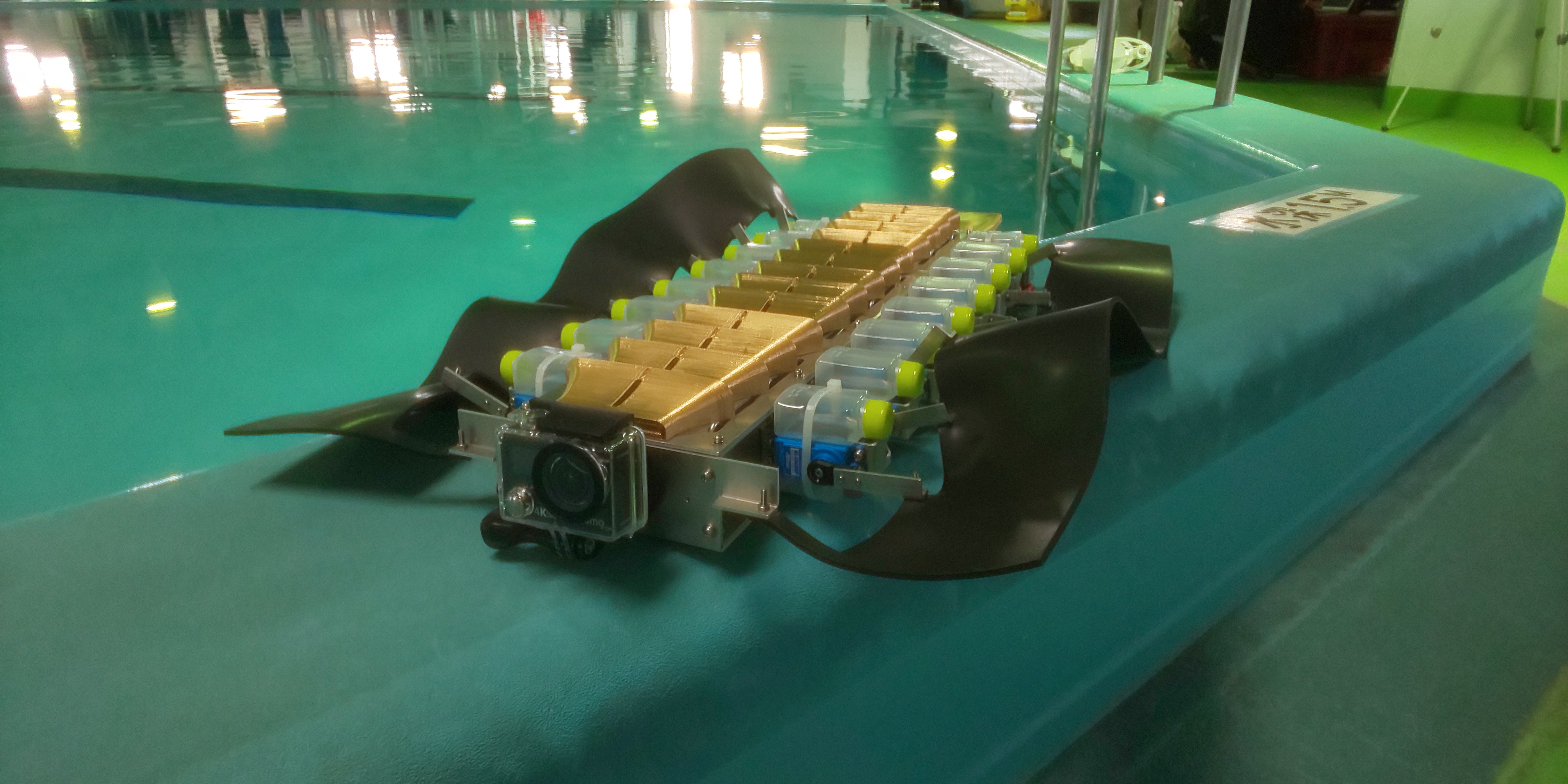
サーボモーターの制御はArduineでおこない 無線はラジコンの27MHzを使いました。 これは40MHz以下ならば水深1〜2m位まで繋がるらしいので・・・・ 前方に水中カメラを搭載しました。 試運転は下記の様でした。 |
|
|
思ったほど推進力が無かったのでサクサク動きませんでした。 また、潜航する事が出来ませんでした。 更にコントロールボックスに漏水がありました。 まだまだ解決しないといけない問題が山積みですね。 つづく・・・・ |