
| 今回は、ROBO−ONE出場のため二足歩行ロボットを作ってみました。 企業でも個人でも人間と同じような二足歩行ロボットを作るとなると 人間と同じような関節数が必要になるため、各関節にサーボモータを使い コンピューター制御ってのがB作のイメージでした。 だから高度なロボット製作者しか作れないと思いこんでましたが、 ROBO−ONE参戦記で書いた様な訳で作ることに決めました。 だから基本コンセプトは「単純構造の二足歩行ロボット」です。 まずは歩くと言うことを細かく分析してみました。
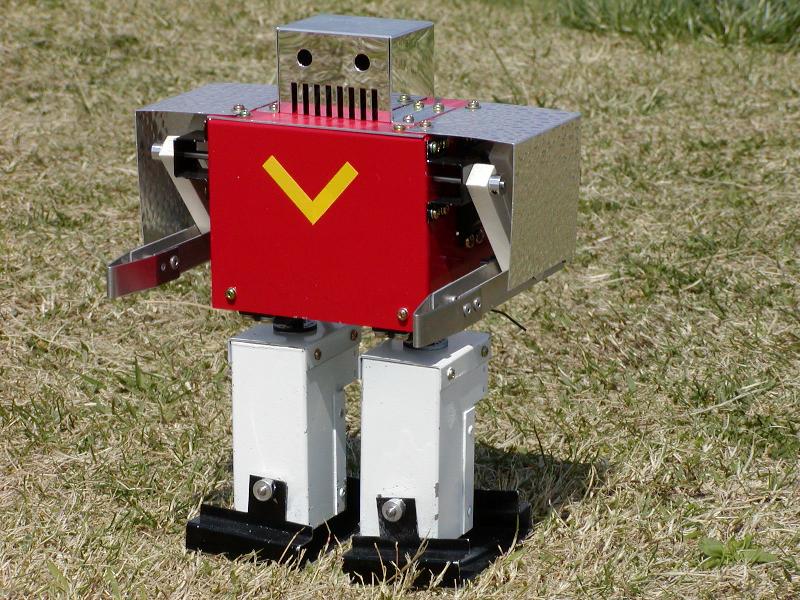
これを実現するための最低限の関節を考えたところ、 たまたまロボコンマガジンNO.19に載ってました レゴの二足歩行ロボット記事が非常に参考になりました。 毘夷零号機(以下びいぜろとする)には、センサーとか コンピューター制御などの複雑な機構は使っていません。 使っているのはラジコンで使われているサーボモータのみです。 このサーボモータについて簡単に説明しますと、このサーボモータは 送信機の操作スティックを動かした量と同じ量回転します。 これを使って、びぃぜろを歩行させています。 びぃぜろには左右の腕にそれぞれ1個ずつ足首に2個、 脚の付け根に2個の計6個搭載してます。 それぞれのモータの役割を説明しますと 腕のモータは腕を前後に動かします。 足首のサーボモータは、モータを動かして身体の重心を 移動させて片足を浮かせます。 |
|---|
 |
 |
 |
| 脚の付け根のモータは、モータを動かすと足を前後に動かすことができます。 | ||
 |
 |
 |
| この二つの動きを組み合わせて歩行させることが出来ます。 順を追って歩行のプロセスを説明します。
極力、単純構造で2足歩行させる機体を創ったつもりだったのですが、全てマニュアル操作が 良かったのかスティックさばきによっては思いも寄らない動きをさせることが出来ました。 |
|---|
![]()