![]()
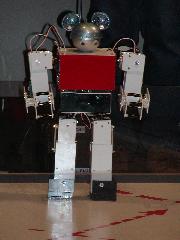
| 毘夷壱号機は、歩行機構は基本的には毘夷零号機と同じです。 ただ、この時のROBO-ONE(第2回)のレギュレーションに屈伸が 出来ると言うが加わったために、屈伸機構を付け加えただけです。 ただ、R-BlueⅢみたいなヒューマノイド系にしてみたくて、 腕をサーボモータを多数使ってみたり、腰の回転サーボモータを つけてみたりと、何の考えも無くやりたい事のテンコ盛りのロボットに なってしまいました。 その結果屈伸は出来ましたが、上半身が重いのでバランスが悪く、 歩行は出来ませんでした。 ブッチャケ・・・失敗作ですね・・・(汗) それでも、チャレンジ精神で造ったという言う意味では評価出来るかな。 大会終了後すぐに解体されてしまいましたが・・・・ |
|---|
![]()