![]()
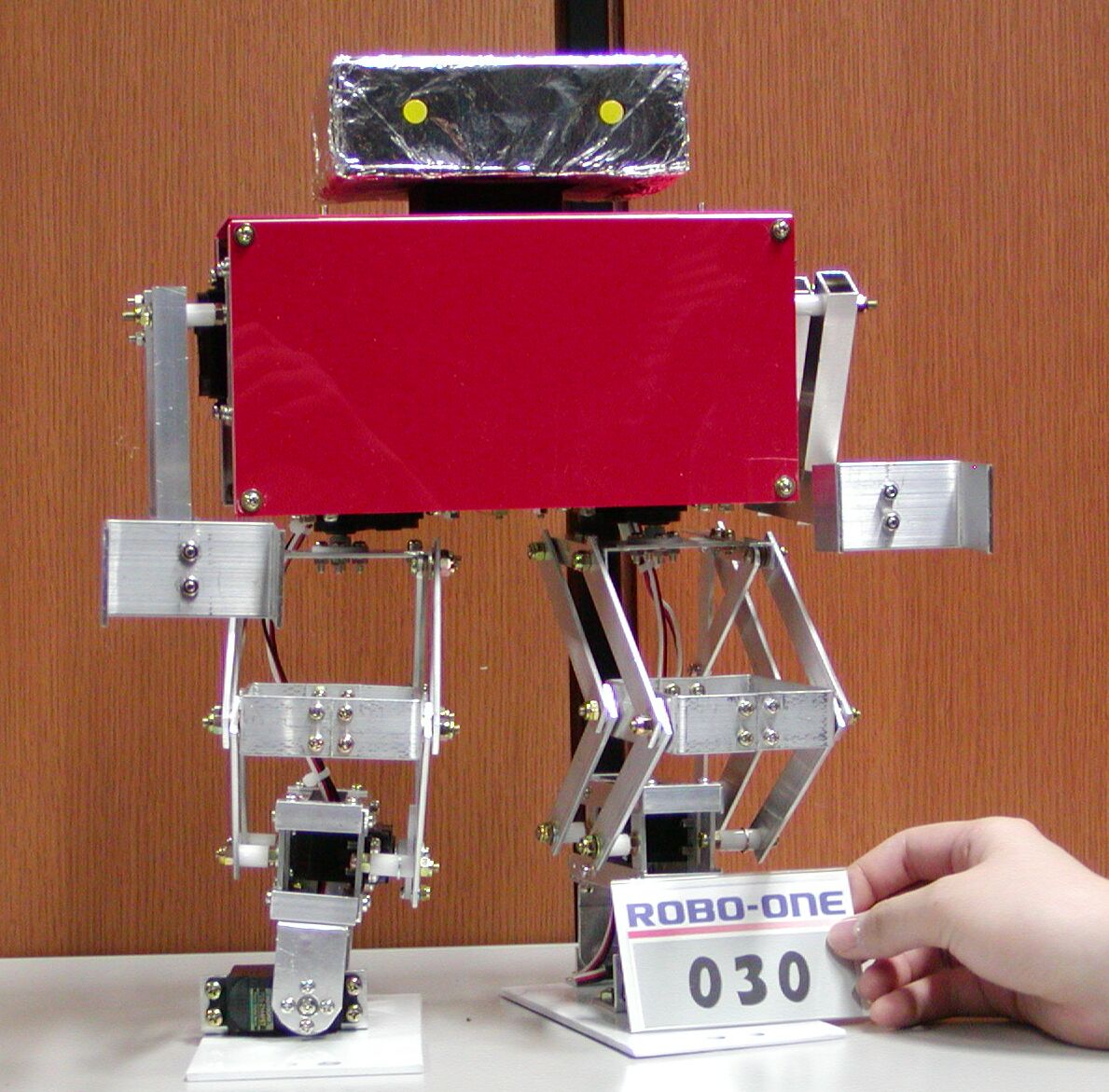
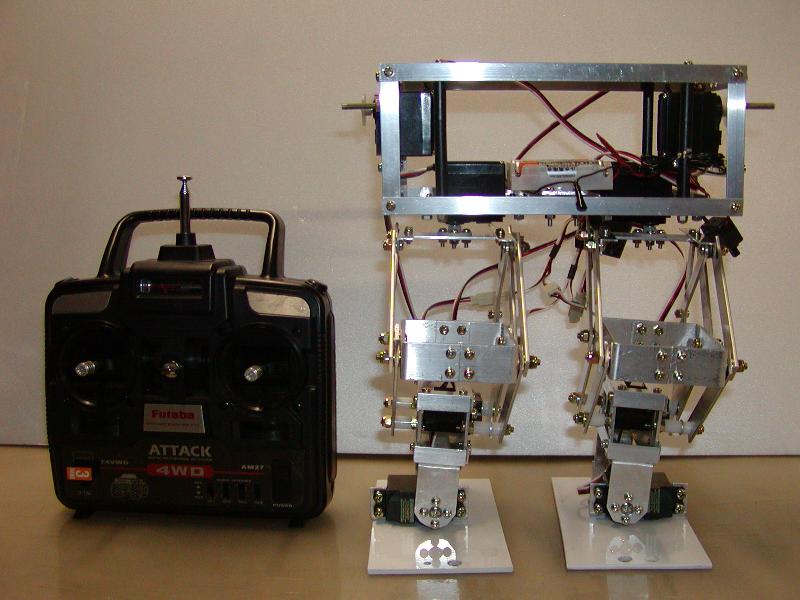
| 第3回ROBO-ONE出場するために開発したロボットです。 ROBO-ONEも3回目になると、コンピューター内臓の機体が 主流となりラジコンオンリーで動いている機体が殆どなくなってきたので あえてラジコンのみで動く機体を作ろうと考えて造ってみました。 毘夷零号機に、毘夷壱号機とは違った形で屈伸する機構を加えた形になってます。 うちに有るラジコンのコントローラは4chしかないので、屈伸のするときだけ、 違うコントローラを使うので2台で操縦することにしました。 単純なので、ろくにテストもしないで出場したので当日は、うまく歩けず結局 予選落ちとなりました。 後で調べたら、頭に使ったゴム(たまたま家にあったものを取り付けました)が 重すぎたらしく、頭を外したら問題なく歩けました。 この機体はビイゼロ方式の二足歩行ロボットとしては、もう少し改良すれば面白い 機体になると思います。 |
|---|
![]()