
2001年6月某日
去年は初出場と言うことで参加できたことだけで喜べましたが 今年は絶対に予選は突破したいと思ってます。 トーシローのロボット工学でチマチマと紹介してきましたが、 この一年....おふじゃんびぃを勝てるロボットにするために トーシローなりに研究を進めてきました。 と偉そうに書いてはおりますが結局は「おふじゃんびぃ弐式プロトⅡ」の足機構で参加となりそうです。 この足機構は構造的に旋回性が悪いので、自分なりにその問題点を解決した足機構を 開発したいとは考えていたのですが。.... やはり難しかったですね。 旋回性重視の「おふじゃんびぃ参式」として構想があったのは、 現在の弐式は四足機構を二つ並べて八足になってますが、 これを二足機構を二つ並べて四足にしたら少しは旋回性が良くなるのでは....と |
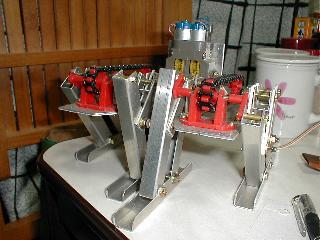
四本足の配置が悪かったのと接地面が縦長すぎたので思ったほど旋回性は良くありませんでした。 もう少し研究を続ければ何か良い案も浮かぶのかも知れませんが残念ながら今回は見合わせました。 なぜなら未だに腕構造が決まってないのです。 大会までに間に合うのかどうか不安になってきてます。 また今年も眠れない日々が続きそうです。 |