
|
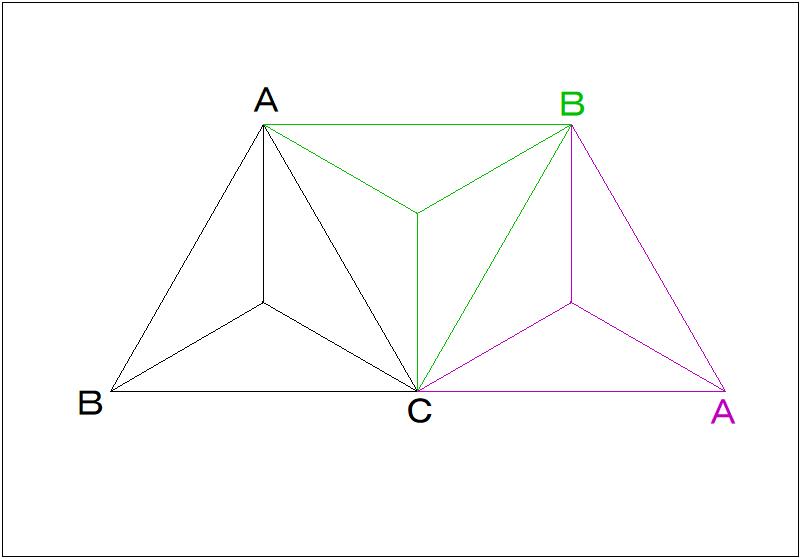
コロナ渦の中、ふとアマビエロボットを創ろうかと思い立ちました。 はじめは3Dプリンターで外装を作り、単なる喋るロボットのつもりでした。 が、ふと歩くアマビエロボットも面白そうだなって考えて アマビエ様は3本脚だから三足歩行ロボットにしないとなってグーグル先生で 三足歩行ロボットについて調べてみました。 そこで山形大学の三足歩行ロボットの論文を見つけました。 三足歩行の歩き方は正三角形の一片を軸に反転させながら移動します。 図にすると下図のようになります。 |
|---|
 |
|
脚の位置をA、B、Cの正三角形だとするとACの辺を軸に反転させてB脚を緑Bに 移動させます。(これが最初の一歩) 次に緑の逆三角形のBCの辺を軸に反転させてA脚を赤紫Aに移動します。 (二歩目) これを繰り返して歩行すると言うものです。 実際にこの歩行をするロボットの動画がYoutubeにありました。(一歩だけですが) |
|
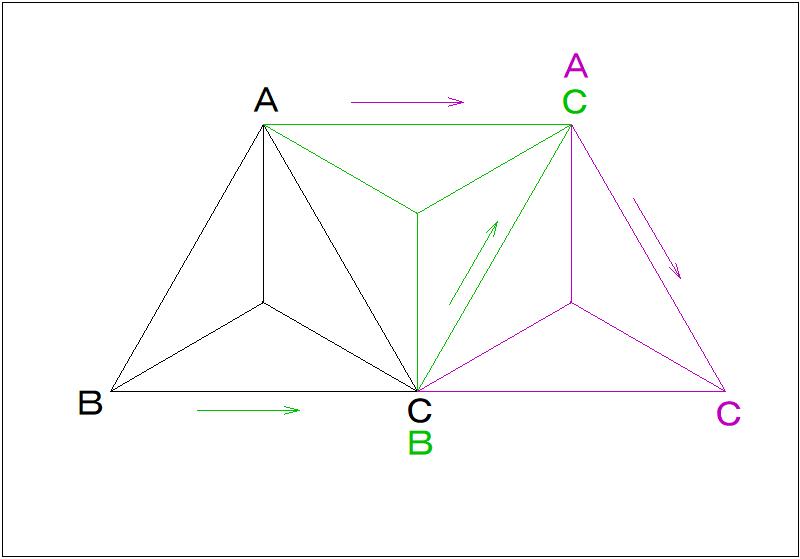
動画でも言っている通り、この歩行だと配線処理を考えないといけないのと 回転させるモーターは無限回転になるので制御が面倒そうだったので 今回はこの歩行を断念しました。 (この歩行は気に入ったのですが・・・) で、どうしたもんかと考えて下図のような歩行を考えました。 |
 |
|
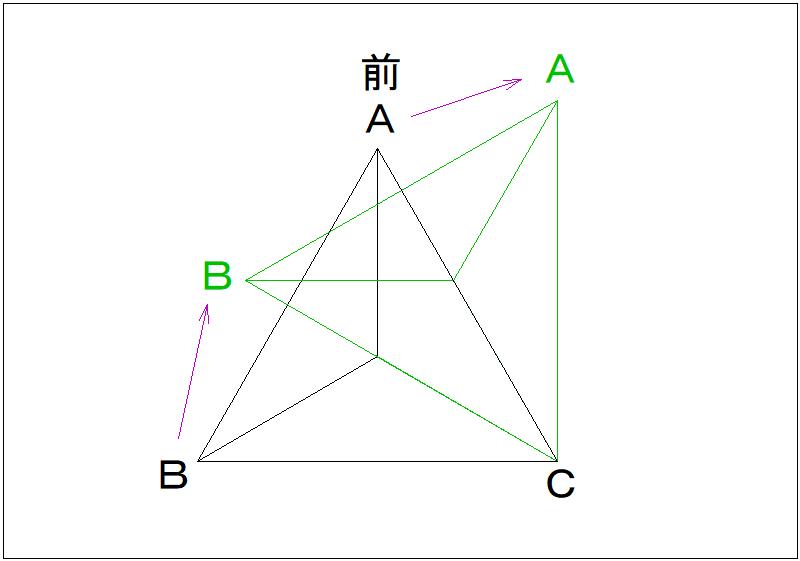
脚A,B,Cの三角形でC脚を緑Cに移動してB脚を緑Bに移動させます。 こうすることによって最初の三角形がA脚を軸に60度回転した事になります。 (最初の一歩) 次に緑の逆三角形で緑C脚を赤Cに移動してA脚を赤Aに移動させます。 これによって緑の逆三角形が緑B脚を軸に60度回転します。 (二歩目) これを繰り返す事で歩行する事が出来ます。 実機ではA脚が正面なので前進する場合には、最初にC脚(もしくはB脚)を 軸にして30度回転させて三角形を横向きにします。(下図参照) |
 |
|
前進、後進、横移動、旋回のモーションを入れて頭を付けてみました。 ウェルズの宇宙戦争に出てきそうな宇宙人のメカをイメージしたのですが バカ殿っぽくなってしまいました。(汗) |