
2001年12月
|
技術と言うのは、そう簡単に盗めるものでは無いです。 前回書いたとおりパクリで(と言ってもHPの画像から自分なりに機構を解析したのですが) 試作機を作ってみましたが、上手く歩かず悩む日々が続いていました。 歩く機構は至って簡単です。 まずどちらか片足に重心を移動して、浮いた足を前(後)に出して足を下ろし 今度は反対の足に重心を移動して浮いた足を前(後)に出して下ろす。 これで歩く事が出来るはずです。 重心移動には上半身を左右に移動して片足に重心移動させ、浮いた足を前後に動かす構造で 試作機は作ってみました。 ところが上半身移動した位では重心移動が上手くいかず片足が浮かなくて歩行する事が出来ませんでした。 お手上げ状態で競技会が近づいてきて焦ってきてました。 そんな時ロボコンマガジンNO.19で二足歩行の特集を載っていたので読んで見ましたところ 特集はレベルが高くて参考にはなりませんでしたが、レゴの記事で二足歩行ロボットを作るのが載ってまして その歩行機構が「毘夷」と同じだったので真似させていただきました。 |
|
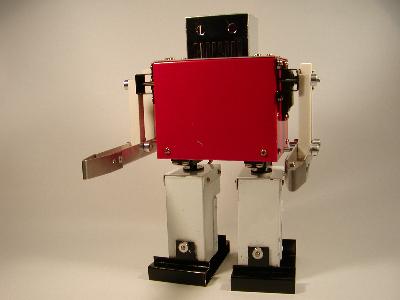
重心移動を足首のサーボモーターで左右に振る様にしました。 これは上手くいき無理無く重心移動することができ、片足を浮かすことが出来ました。 サーボモーター4個でコンピュータ制御一切無い二足歩行ロボットが完成することが出来ました。 競技はバトルなので腕をサーボモーター一個ずつ使い頭を付けてみました。 デザインとか全然考える余裕が無かったので四角四角の組み合わせの昔々のロボットになってしまいました。 ちなみに腕は、かわさき大会でお蔵入りになった「おふじゃんびぃ弐式プロトⅢ」の腕を使いました。 今回は操縦が難しいので、1月に入ってからは操縦訓練をおこなってました。 予選ではバトルではなくパフォーマンスで審査員の得点を獲得しないと通過できないので 歩くだけではなく何かインパクトを与えるモノが無いと・・・と考えていました。 とは言うものの構想がシンプルで歩く事と腕を前後に出すしか出来ない毘夷には物足りないなぁとは思ってました。 ところが操縦訓練をおこなってる中で偶然足首のサーボモーターを素早く動かすとサイドステップが 出来ることを発見しました。 更に偶然前に倒れたとき腕を押し出して立ち上がらないかと実験したところ起き上がりはしなかったけれど その動きが腕立て伏せに見える事を発見しました。 この二つの必殺技で予選突破を目指すことにしました。 |